Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
Published:
In a recent project for MECS6616 Robot Learning, I got hands-on experience for Model Predictive Control (MPC). To solve the problem, the use of constant action and pseudo-gradient is a recommended method, and it truly provides simple yet good enough solutions. However, the project instructions also hinted at another prospect: a differentiable forward model could help, since you can always compute numerical gradients. This piqued my curiosity - could we directly compute the gradient with respect to action given the evaluation metric? And if so, how could we implement this practically?
Published:
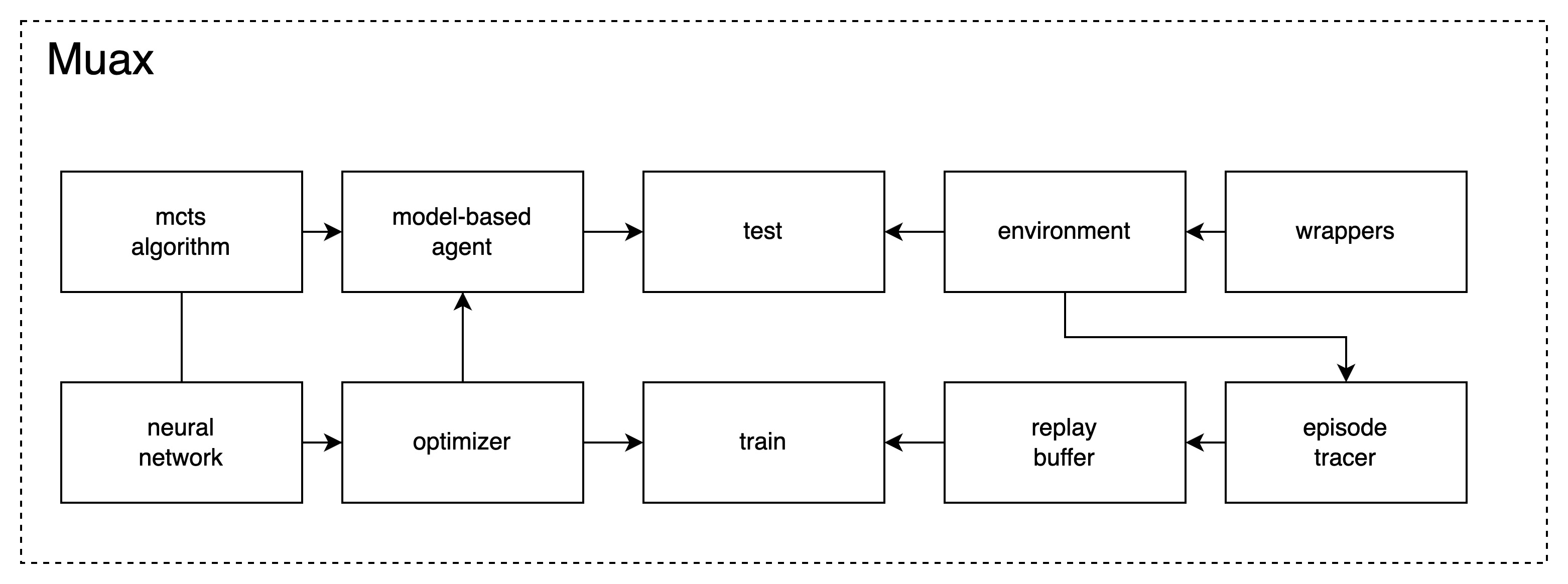
Muax provides help for using DeepMind’s mctx on gym-style environments.
Published:
This week, I will share a paper published by OpenAI at NeurIPS 2017. The ideas presented in this paper are quite insightful, and it tackles a complex problem using only simple algorithmic improvements. I gained significant inspiration from this paper. At the end, I will also provide a brief implementation of HER (Hindsight Experience Replay).
Published:
This week, I would like to share a paper published at NeurIPS 2021. When dealing with tabular data, I often find myself perplexed. On one hand, I am unsure which deep learning frameworks are better suited for this task, and on the other hand, I am uncertain whether the time-consuming process of training a model can outperform the easily accessible GBDT family of models such as XGBoost and LightGBM. However, this paper provides a detailed and comprehensive comparison of deep learning algorithms and GBDT models on tabular data. It introduces new baselines and presents a novel architecture that outperforms other deep learning models. I have gained a lot from this paper and would like to share it with you.
Published:
Can deep reinforcement learning algorithms be used to train a trading agent that can achieve long-term profitability using Limit Order Book (LOB) data? To answer this question, this article proposes a deep reinforcement learning framework for high-frequency trading and conducts experiments using limit order data from LOBSTER with the PPO algorithm. The results show that the agent is able to identify short-term patterns in the data and propose profitable trading strategies.
Proposed a MCTS-based reinforcement learning algorithm to perform active slam. 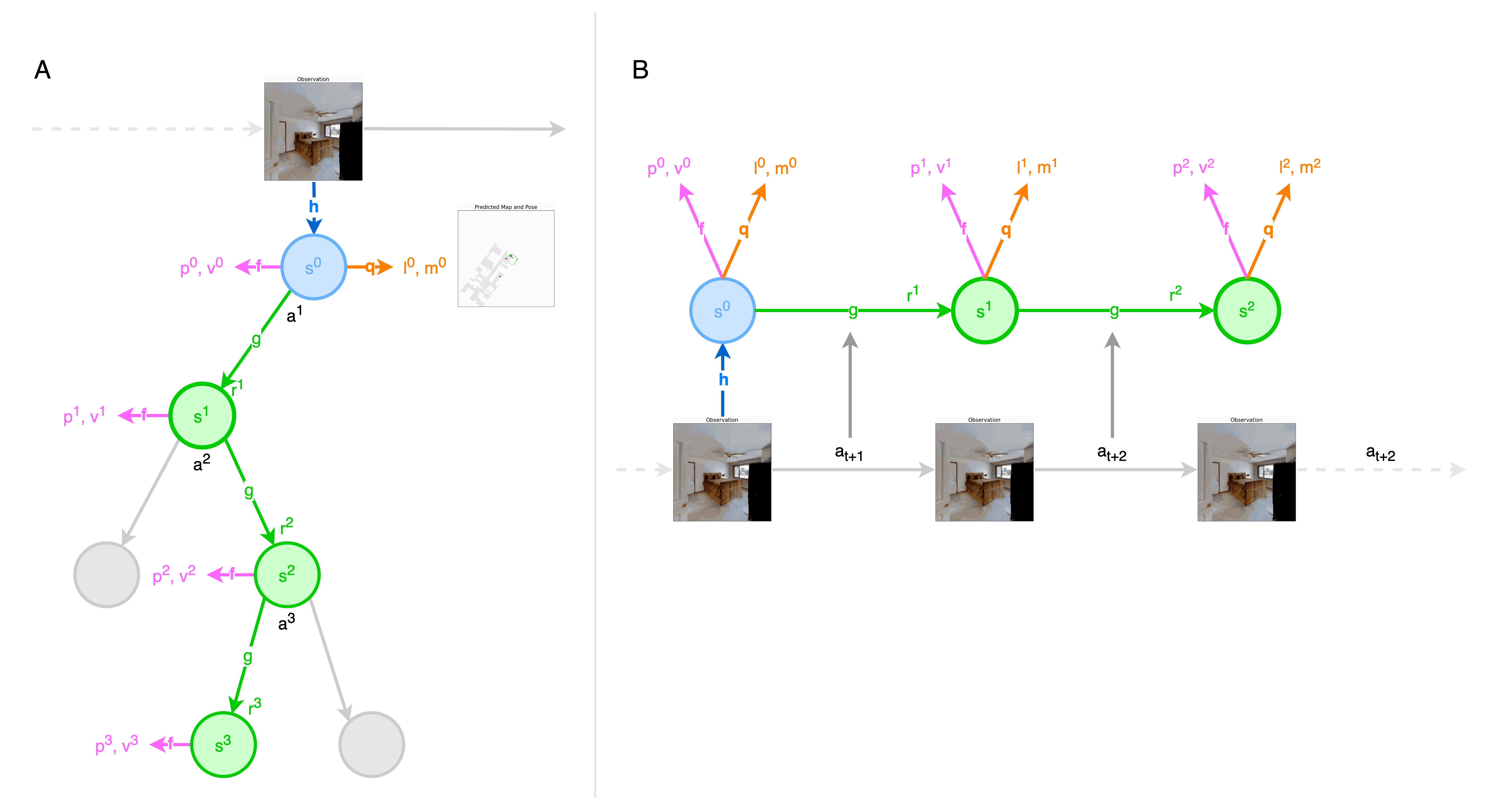
Proposed a GNN model based on temporal transaction network to predict Ethereum Transaction Cost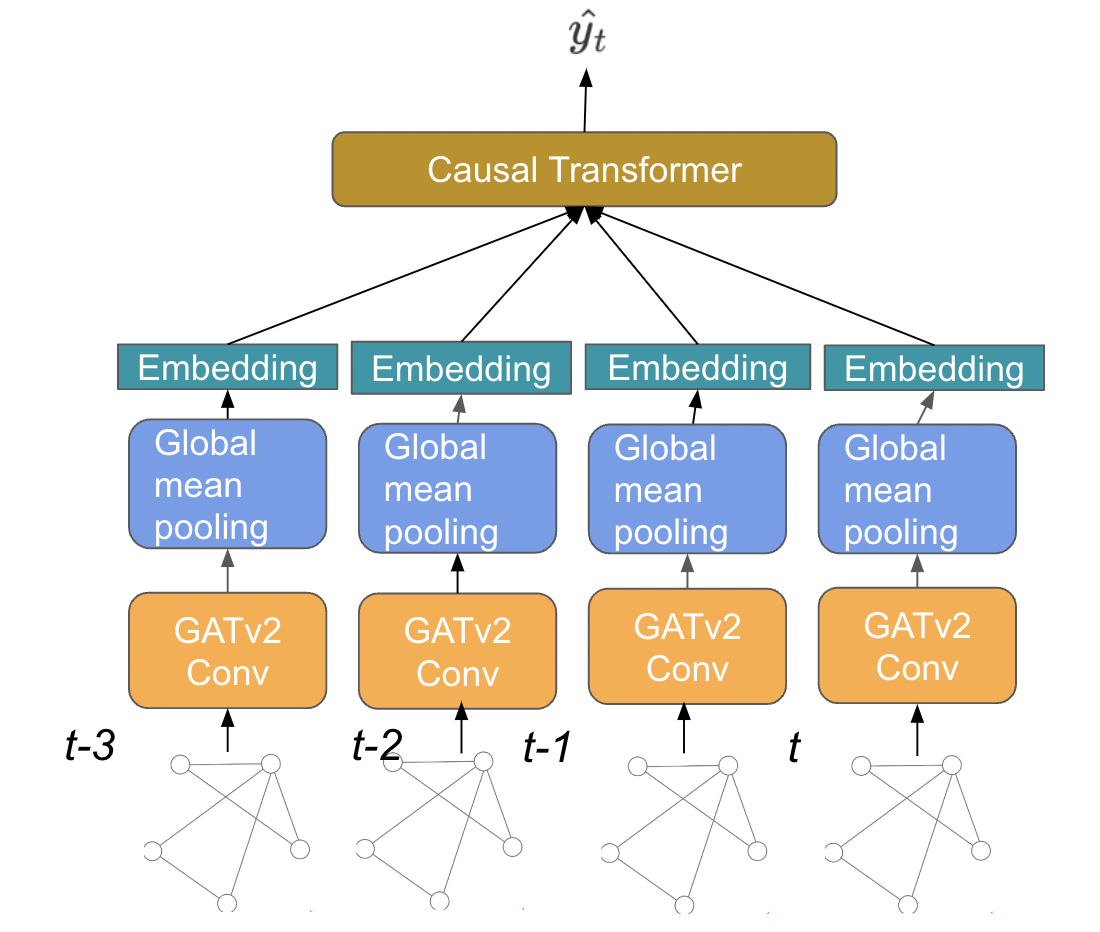
Propose an attention-based vision policy that can play Atari games based on pixel input.
Proposed a reward engineering method and leveraged function approximation for value function.
Published in , 2023
RL for operator sequential execution
Download here
Published in ICAPS, 2024
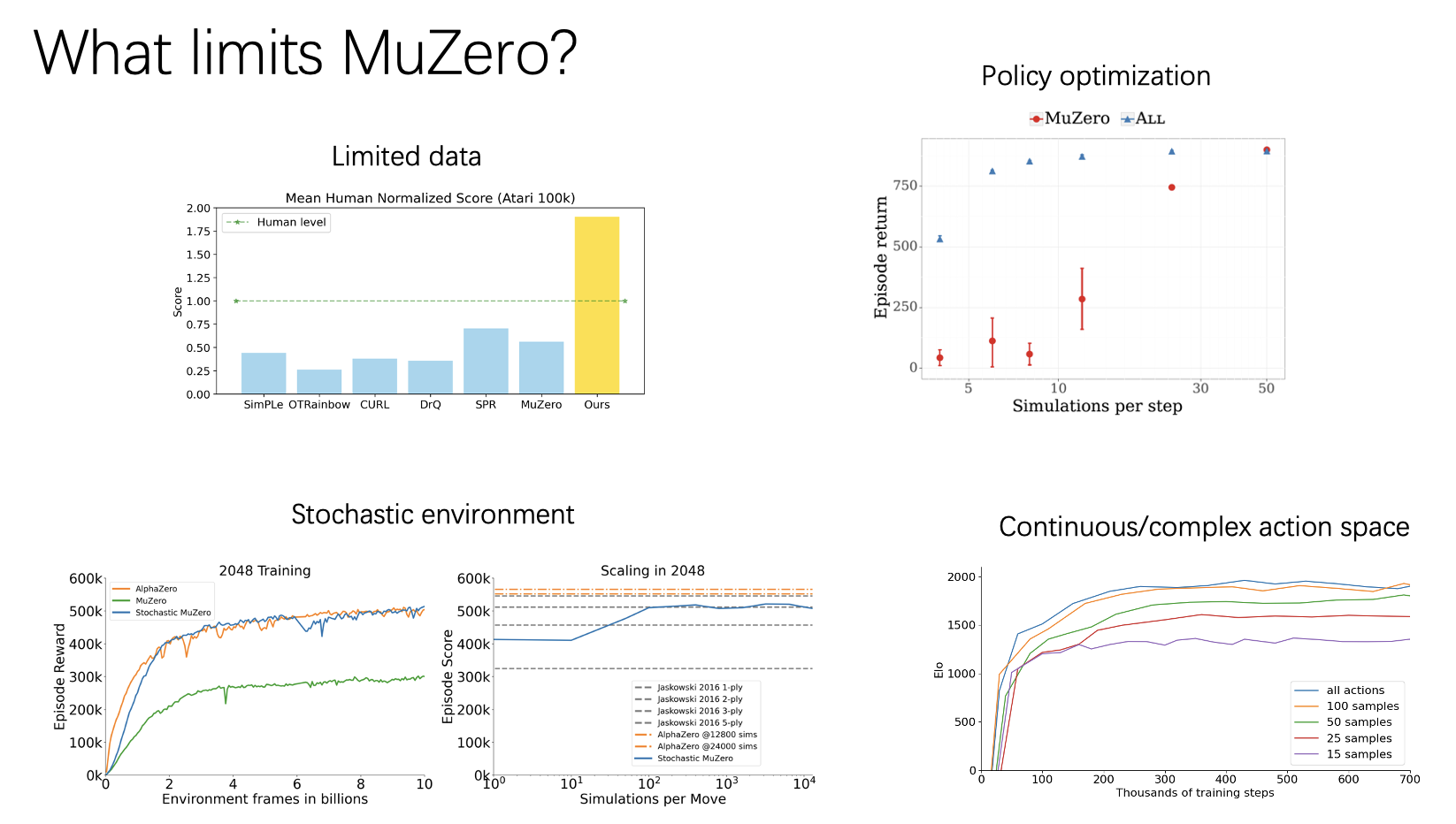
SLAM + MuZero for navigation
Download here
Published in , 2024
LLM for Route Recommendation
Download here
Published:
session: OR via Reinforcement Learning and Beyond, INFORMS 2023
Published:
session: Robots and Space, ICAPS 2024
Graduate course, Columbia University, IEOR, 2023
Take the role of Teaching Assistant for Graduate Optimization Models and Methods, topics include linear programming, the simplex method, duality, nonlinear, integer and dynamic programming. Duties included: