publications
A list of my publications.
2026
- Decaying Budget Forcing: A Simple and Effective Reinforcement Learning Approach for Balancing Accuracy and Capacity in Mathematical ReasoningIn submission, 2026
2025
-
 Do Math Reasoning LLMs Help Predict the Impact of Public Transit Events?Under review at Transportation Research Part C (Special Issue: Foundation Models and Large Language Models in Urban Mobility), 2025arXiv preprint
Do Math Reasoning LLMs Help Predict the Impact of Public Transit Events?Under review at Transportation Research Part C (Special Issue: Foundation Models and Large Language Models in Urban Mobility), 2025arXiv preprint -
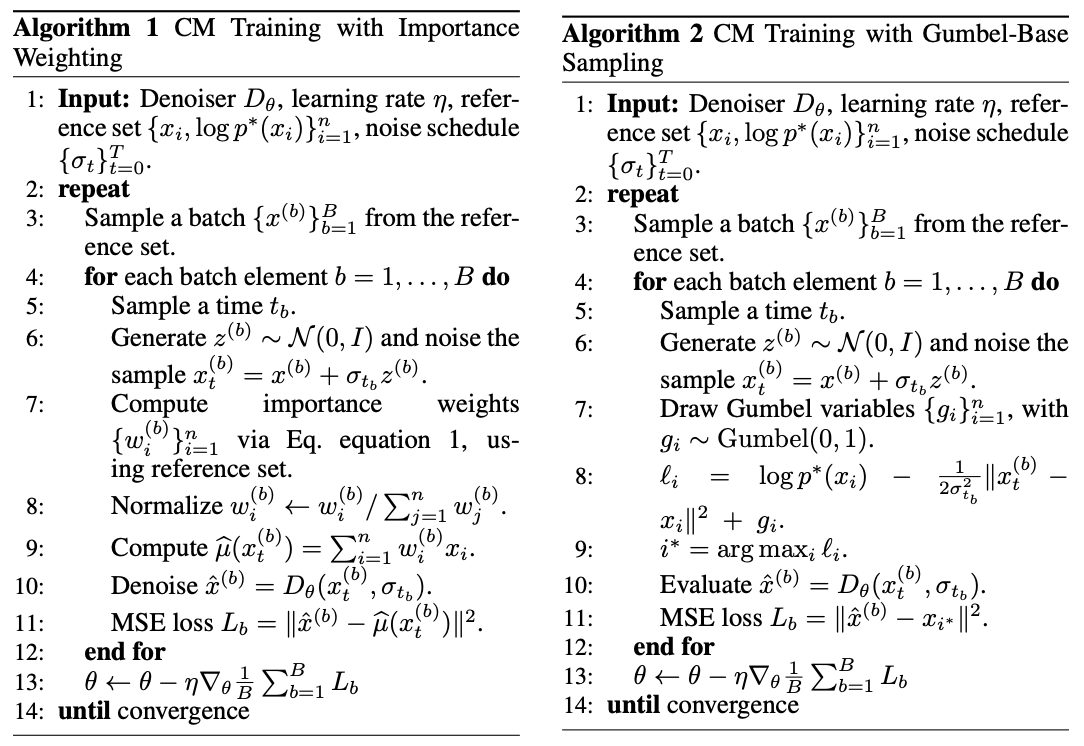 Efficient Consistency Model Training for Policy Distillation in Reinforcement LearningIn ICLR 2025 Workshop on Deep Generative Model in Machine Learning: Theory, Principle and Efficacy, 2025
Efficient Consistency Model Training for Policy Distillation in Reinforcement LearningIn ICLR 2025 Workshop on Deep Generative Model in Machine Learning: Theory, Principle and Efficacy, 2025 -
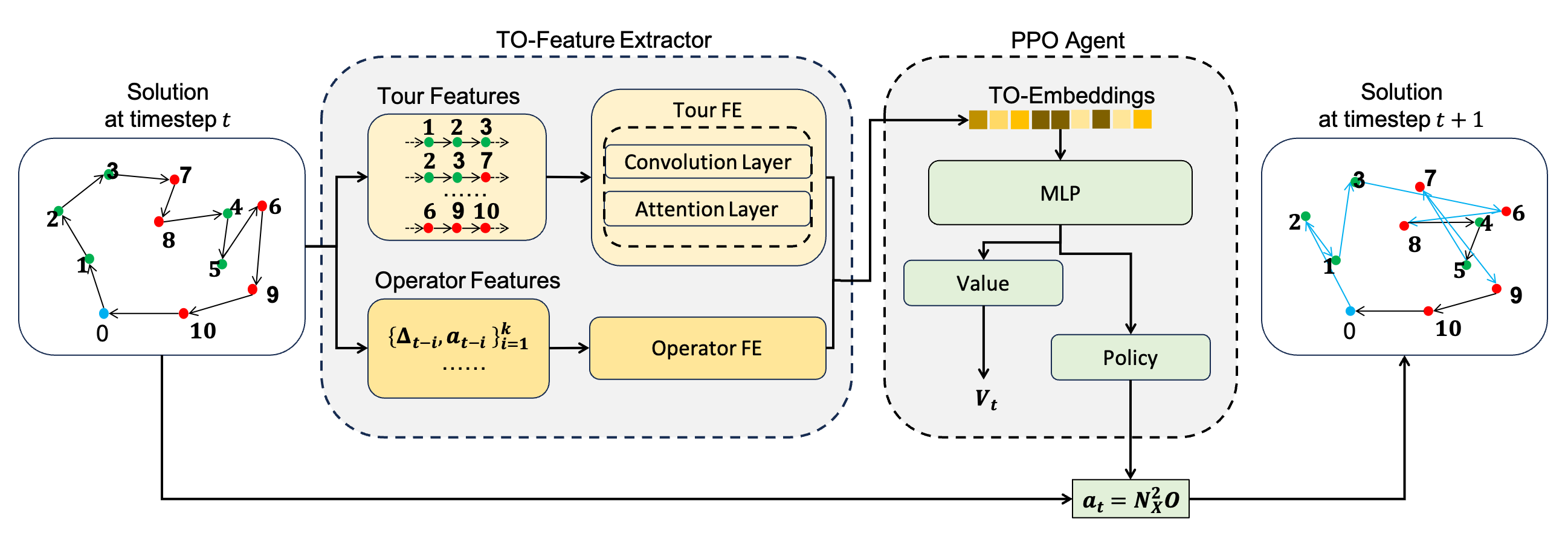 Learn to Tour: Operator Design for Solution Feasibility Mapping in Pickup-and-delivery Traveling Salesman ProblemIn Proceedings of the IEEE Intelligent Transportation Systems Conference (ITSC), 2025
Learn to Tour: Operator Design for Solution Feasibility Mapping in Pickup-and-delivery Traveling Salesman ProblemIn Proceedings of the IEEE Intelligent Transportation Systems Conference (ITSC), 2025 -
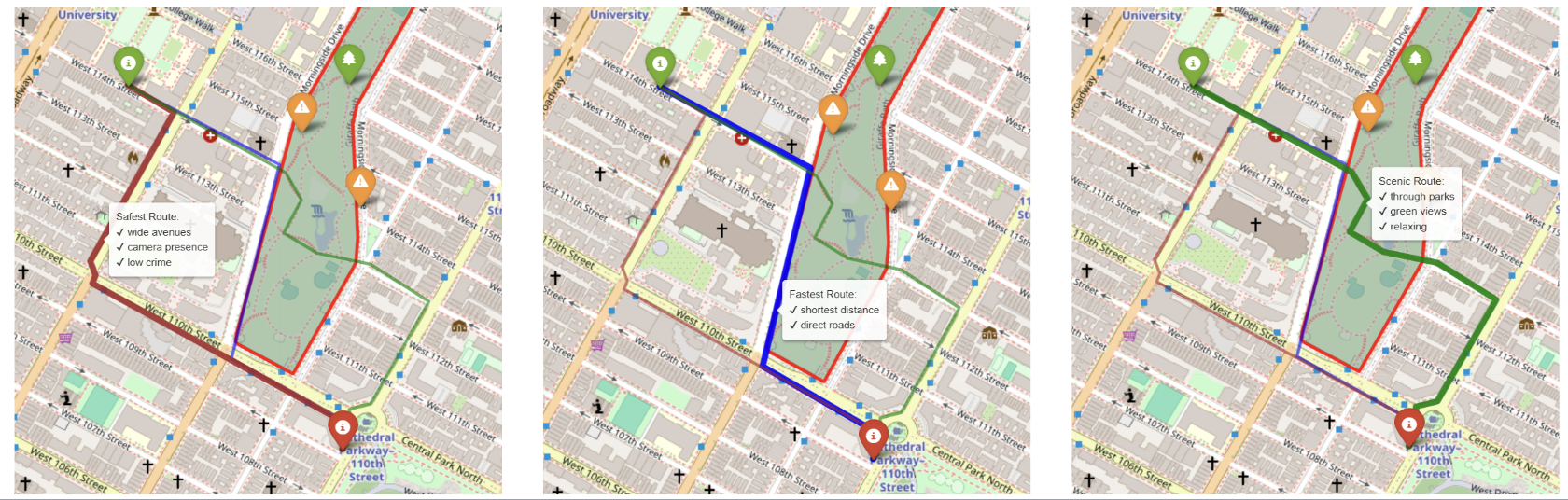 TraveLLM: Could you plan my new public transit route in face of a network disruption?In Proceedings of the IEEE Intelligent Transportation Systems Conference (ITSC), 2025
TraveLLM: Could you plan my new public transit route in face of a network disruption?In Proceedings of the IEEE Intelligent Transportation Systems Conference (ITSC), 2025
2024
2023
- Comparative Graph Analysis on Ethereum:‘The Merge’and Gas Price Prediction2023